Die Steuerung eines DC Motors mit einem Arduino ist eine grundlegende Fähigkeit, die viele Projekte im Bereich der Robotik und Automatisierung ermöglicht. Um einen DC Motor effizient zu betreiben, ist ein H-Brücken-Schaltkreis erforderlich, da das Arduino nicht genügend Spannung oder Strom liefern kann, um den Motor direkt zu betreiben. Ein H-Bridge ermöglicht es, den Motor in beiden Richtungen zu drehen und die Geschwindigkeit mithilfe von Pulsweitenmodulation (PWM) zu steuern.
In diesem Artikel erfahren Sie, welche Komponenten benötigt werden, um einen DC Motor mit einem Arduino zu verbinden, sowie die Schritte zur Verdrahtung und Programmierung. Wir werden auch alternative Methoden zur Steuerung des Motors besprechen und wichtige Tipps zur Fehlersuche geben. Egal, ob Sie ein Anfänger oder ein erfahrener Bastler sind, diese Anleitung bietet Ihnen die notwendigen Informationen für eine erfolgreiche Umsetzung.
Kernpunkte:
- Ein H-Brücken-Schaltkreis ist erforderlich, um einen DC Motor mit einem Arduino zu steuern.
- Beliebte H-Brücken-ICs sind der L298N und L293D, die bis zu 2A pro Motor handhaben können.
- Die Verdrahtung umfasst den Anschluss des Motors, der Stromversorgung und der Steuerpins an das Arduino.
- Die Programmierung erfolgt über einfache Befehle wie digitalWrite() und analogWrite() zur Steuerung von Richtung und Geschwindigkeit.
- Alternative Steuerungsmethoden umfassen die Verwendung von Transistoren oder integrierten Motorsteuerungsmodulen.
- Es ist wichtig, separate Stromversorgungen für den Motor und das Arduino zu verwenden, um Schäden zu vermeiden.
Die notwendigen Komponenten für die Verbindung eines DC Motors mit Arduino
Um einen DC Motor mit einem Arduino zu steuern, sind bestimmte Komponenten erforderlich, die eine zuverlässige und sichere Verbindung gewährleisten. Ein essenzieller Bestandteil ist das H-Brücken-IC, das es ermöglicht, den Motor in beiden Richtungen zu betreiben und die Geschwindigkeit zu kontrollieren. Zu den gängigen H-Brücken-ICs gehören der L298N und der L293D, die beide bis zu 2A pro Motor handhaben können. Es ist wichtig, bei diesen Stromstärken Kühlkörper zu verwenden, um Überhitzung zu vermeiden.
Zusätzlich zu den H-Brücken-ICs sind weitere Bauteile notwendig, um die Schaltung zu vervollständigen. Dazu gehören Widerstände, die den Stromfluss regulieren, sowie Transistoren, die als Schalter fungieren können. Auch Diode sind wichtig, um Rückströme zu verhindern, die durch die Induktivität des Motors entstehen können. Diese Komponenten tragen dazu bei, die Schaltung zu schützen und die Funktionalität zu gewährleisten.
Auswahl des richtigen H-Brücken-ICs für optimale Motorsteuerung
Bei der Auswahl eines H-Brücken-ICs sind mehrere Faktoren zu berücksichtigen. Zunächst ist die Stromstärke entscheidend; das IC sollte in der Lage sein, den maximalen Strom, den der Motor benötigt, zu bewältigen. Zudem sollte die Spannungsfestigkeit des ICs zu der Betriebsspannung des Motors passen. Ein weiterer wichtiger Aspekt ist die Benutzerfreundlichkeit: Einige H-Brücken-ICs sind einfacher zu handhaben und bieten mehr Funktionen, was die Integration in Projekte erleichtert.
Weitere benötigte Bauteile: Widerstände, Transistoren und mehr
Zusätzlich zu den H-Brücken-ICs sind verschiedene andere Bauteile erforderlich, um eine zuverlässige Funktion der Schaltung sicherzustellen. Widerstände sind notwendig, um den Stromfluss zu steuern und die Schaltung vor Überlastung zu schützen. Transistoren können als Schalter verwendet werden, um den Motor zu aktivieren oder zu deaktivieren, während Diode Rückströme abfangen, die andernfalls die Schaltung beschädigen könnten. Diese Komponenten tragen dazu bei, die Sicherheit und Effizienz der Motorsteuerung zu erhöhen.
| H-Brücken-IC | Max. Strom (A) | Spannungsbereich (V) | Besonderheiten |
|---|---|---|---|
| L298N | 2 | 5-46 | Dual-Channel, PWM-fähig |
| L293D | 2 | 4.5-36 | Integrierte Schutzdioden |
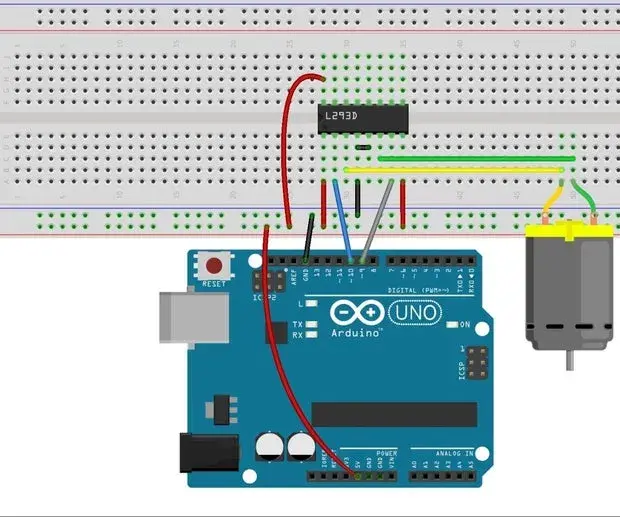
Schritt-für-Schritt-Anleitung zur Verdrahtung des DC Motors mit Arduino
Um einen DC Motor erfolgreich mit einem Arduino zu verbinden, ist es wichtig, die grundlegenden Verdrahtungsprinzipien zu verstehen. Zunächst sollten alle Komponenten, einschließlich des H-Brücken-ICs, des Motors und des Arduino, sicher platziert werden. Achten Sie darauf, dass die Verbindungen fest sind, um Kurzschlüsse und Fehlfunktionen zu vermeiden. Verwenden Sie geeignete Kabel und stellen Sie sicher, dass die Polarität korrekt ist, um Schäden an den Komponenten zu verhindern.
Die spezifischen Verbindungen hängen vom verwendeten H-Brücken-Modell ab. Bei der Verbindung des L298N beispielsweise sollten die Pins IN1 und IN2 mit den digitalen Pins des Arduino verbunden werden, um die Drehrichtung zu steuern. Der Enable-Pin wird an einen PWM-fähigen Pin des Arduino angeschlossen, um die Geschwindigkeit des Motors zu regulieren. Achten Sie darauf, die Stromversorgung und die Masse korrekt zu verbinden, um eine stabile Funktion zu gewährleisten.
Detaillierte Verdrahtungsschemata für verschiedene H-Brücken
Die Verdrahtungsschemata variieren je nach H-Brücken-Modell. Der L298N erfordert beispielsweise eine andere Konfiguration als der L293D. Während der L298N zwei Kanäle hat, die unabhängig voneinander gesteuert werden können, ist der L293D einfacher, jedoch weniger leistungsstark. Bei beiden Modellen ist es wichtig, die Pins für die Motorsteuerung korrekt anzuschließen, um eine optimale Leistung zu erzielen. Ein detailliertes Diagramm zeigt die spezifischen Verbindungen für jedes Modell und hilft, Fehler zu vermeiden.
| H-Brücken-Modell | Wesentliche Verbindungen | Besonderheiten |
|---|---|---|
| L298N | IN1, IN2, EN, Motor Pins | Duale Steuerung, PWM-fähig |
| L293D | IN1, IN2, EN, Motor Pins | Integrierte Schutzdioden |
Anschluss des Motors und der Stromversorgung richtig gestalten
Bei der Verbindung des Motors und der Stromversorgung ist es entscheidend, die richtigen Spannungen und Ströme zu verwenden. Überprüfen Sie die Spezifikationen des Motors, um sicherzustellen, dass die Stromversorgung die erforderliche Spannung liefert, ohne die maximalen Werte zu überschreiten. Verwenden Sie separate Stromquellen für den Motor und das Arduino, um Spannungsschwankungen zu vermeiden, die die Komponenten beschädigen könnten. Eine stabile Verbindung ist entscheidend, um eine reibungslose Funktion des Systems zu gewährleisten.
Programmierung des Arduino zur Steuerung des DC Motors
Die Programmierung des Arduino zur Steuerung eines DC Motors ist ein entscheidender Schritt, um die gewünschte Funktionalität zu erreichen. Der Code verwendet grundlegende Befehle, um die Motorbewegung zu steuern, indem er die H-Brücke ansteuert. Die Struktur des Codes umfasst die Festlegung von Pins für die Steuerung der Richtung und der Geschwindigkeit des Motors. Die Verwendung von Pulsweitenmodulation (PWM) ermöglicht eine präzise Steuerung der Motorleistung. Dieser Abschnitt bietet einen Überblick über die grundlegenden Programmieransätze, die Sie benötigen, um den Motor effizient zu steuern.
Ein einfaches Beispiel für den Arduino-Code zeigt, wie man den Motor in eine Richtung dreht, stoppt und dann in die entgegengesetzte Richtung dreht. Die Verwendung von Funktionen wie digitalWrite() und analogWrite() ermöglicht es, die Richtung und Geschwindigkeit des Motors einfach zu steuern. Im Folgenden finden Sie einige Beispielcodes, die Ihnen helfen, die Grundlagen der Motorsteuerung zu verstehen und anzuwenden.
Beispielcode für einfache Motorsteuerung mit PWM
Hier ist ein einfaches Beispiel für Arduino-Code, der die Steuerung eines DC Motors mit PWM demonstriert. Der Code setzt voraus, dass der Motor über ein H-Brücken-IC wie den L298N angeschlossen ist. Zuerst definieren wir die Pins:
#define IN1 8
#define IN2 9
#define ENA 2
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
}
void loop() {
digitalWrite(IN1, HIGH); // Motor dreht vorwärts
digitalWrite(IN2, LOW);
analogWrite(ENA, 255); // Volle Geschwindigkeit
delay(3000); // 3 Sekunden warten
digitalWrite(IN1, LOW); // Motor stoppt
digitalWrite(IN2, LOW);
delay(1000); // 1 Sekunde warten
digitalWrite(IN1, LOW); // Motor dreht rückwärts
digitalWrite(IN2, HIGH);
analogWrite(ENA, 255); // Volle Geschwindigkeit
delay(3000); // 3 Sekunden warten
digitalWrite(IN1, LOW); // Motor stoppt
digitalWrite(IN2, LOW);
delay(1000); // 1 Sekunde warten
}
In diesem Code wird der Motor für 3 Sekunden in eine Richtung gedreht, gefolgt von einer Pause und dann in die entgegengesetzte Richtung.
Anpassung des Codes für Geschwindigkeits- und Richtungsänderungen
Um die Geschwindigkeit und Richtung des Motors anzupassen, können Sie die Werte in den analogWrite() Befehlen ändern. Zum Beispiel können Sie den Wert von 255 auf einen niedrigeren Wert wie 128 ändern, um die Geschwindigkeit zu halbieren. Um die Richtung zu ändern, ändern Sie einfach die digitalWrite() Befehle für IN1 und IN2. Sie können auch einen Potentiometer verwenden, um die Geschwindigkeit dynamisch anzupassen, indem Sie den analogen Wert lesen und ihn an analogWrite() übergeben. Dies ermöglicht eine flexiblere Steuerung des Motors in Echtzeit.
Tipps zur Fehlersuche bei der Motorsteuerung mit Arduino
Bei der Steuerung eines DC Motors mit einem Arduino können verschiedene Probleme auftreten, die oft auf Verdrahtungsfehler zurückzuführen sind. Zu den häufigsten Problemen zählen lose Verbindungen, die dazu führen können, dass der Motor nicht richtig funktioniert oder gar nicht reagiert. Auch falsche Verbindungen, wie das Vertauschen von Pins, können dazu führen, dass der Motor in die falsche Richtung dreht oder gar nicht anläuft. Es ist wichtig, alle Verbindungen regelmäßig zu überprüfen und sicherzustellen, dass sie fest und korrekt sind, um eine reibungslose Funktion zu gewährleisten.
Zusätzlich zu den Verdrahtungsproblemen können auch Fehler im Code zu unerwarteten Verhaltensweisen führen. Häufige Probleme sind falsche Pin-Definitionen oder die Verwendung von nicht unterstützten PWM-Signalen, die die Motorsteuerung beeinträchtigen können. Es ist ratsam, den Code Schritt für Schritt zu überprüfen und sicherzustellen, dass alle Funktionen korrekt implementiert sind. Eine systematische Fehlersuche kann helfen, Probleme schnell zu identifizieren und zu beheben.
- Überprüfen Sie alle Verbindungen auf Festigkeit und Richtigkeit.
- Stellen Sie sicher, dass die Pin-Definitionen im Code mit den tatsächlichen Anschlüssen übereinstimmen.
- Testen Sie den Motor mit einem einfachen Beispielcode, um sicherzustellen, dass er funktioniert.
- Verwenden Sie einen Multimeter, um Spannungen und Ströme zu überprüfen und sicherzustellen, dass alles im Normbereich liegt.
Häufige Probleme und deren Lösungen bei der Verdrahtung
Ein häufiges Problem bei der Verdrahtung ist das Vorhandensein von losen Verbindungen. Diese können dazu führen, dass der Motor nicht reagiert oder sporadisch funktioniert. Überprüfen Sie alle Kabelverbindungen und stellen Sie sicher, dass sie fest sitzen. Ein weiteres Problem sind falsche Verbindungen, bei denen Pins vertauscht werden, was zu unerwartetem Verhalten führt. Es ist wichtig, die Schaltung sorgfältig zu überprüfen und sicherzustellen, dass alle Komponenten korrekt angeschlossen sind.
Fehler im Code erkennen und beheben für reibungslose Funktion
Um Fehler im Code zu erkennen, sollten Sie sicherstellen, dass alle Pin-Definitionen korrekt sind und dass die verwendeten Funktionen mit der Hardware kompatibel sind. Häufige Fallstricke sind die Verwendung von falschen PWM-Pins oder das Vergessen, Pins im setup() korrekt zu initialisieren. Debugging-Tools, wie serielle Ausgaben, können helfen, den Status des Codes zu überprüfen und Probleme schneller zu identifizieren. Achten Sie darauf, die Logik Ihres Codes zu überprüfen, um sicherzustellen, dass keine unerwarteten Bedingungen auftreten.
Alternative Methoden zur Steuerung eines DC Motors mit Arduino
Es gibt mehrere alternative Methoden, um einen DC Motor mit einem Arduino zu steuern, die über die traditionelle H-Bridge-Steuerung hinausgehen. Eine beliebte Methode ist die Verwendung von Transistoren als Schalter. Transistoren wie der TIP120 können verwendet werden, um die Stromzufuhr zum Motor zu steuern, indem sie an die digitalen Pins des Arduino angeschlossen werden. Diese Methode ist besonders nützlich, wenn Sie einfache Schaltungen benötigen und die Kosten niedrig halten möchten. Transistoren ermöglichen es, die Motorsteuerung effizient zu gestalten, ohne die Komplexität einer H-Bridge einführen zu müssen.
Eine weitere effektive Methode zur Motorsteuerung ist die Verwendung von Motorsteuerungsmodulen, die oft eine integrierte H-Bridge enthalten. Diese Module bieten eine benutzerfreundliche Schnittstelle und erfordern weniger Verdrahtung, was die Implementierung erheblich vereinfacht. Zudem sind viele dieser Module mit Schutzschaltungen ausgestattet, die eine Überlastung und Überhitzung verhindern. Im Vergleich zur Verwendung einer separaten H-Bridge können Motorsteuerungsmodule Zeit und Aufwand sparen und sind oft kostengünstiger, wenn man die gesamte Schaltung betrachtet.
| Steuerungsmethode | Vorteile | Nachteile |
|---|---|---|
| H-Bridge | Ermöglicht bidirektionale Steuerung und PWM | Komplexere Verdrahtung |
| Transistoren | Kostengünstig, einfach zu implementieren | Begrenzte Steuerungsfunktionen |
| Motorsteuerungsmodul | Einfach zu verwenden, integrierte Schutzschaltungen | Kann teurer sein als einfache Transistorlösungen |
Verwendung von Transistoren als Schalter für DC Motors
Um einen DC Motor mit einem Transistor zu steuern, benötigen Sie einen geeigneten Transistor, wie den TIP120. Schließen Sie den Transistor so an, dass der Motor zwischen dem Kollektor und dem Emitter des Transistors verbunden ist. Der Basisanschluss des Transistors wird mit einem digitalen Pin des Arduino verbunden. Wenn der Pin HIGH ist, leitet der Transistor den Strom und der Motor läuft. Diese Methode ermöglicht es Ihnen, den Motor einfach zu steuern, indem Sie den digitalen Pin ein- oder ausschalten. Ein Schaltplan kann Ihnen helfen, die korrekten Verbindungen herzustellen und sicherzustellen, dass der Transistor ordnungsgemäß funktioniert.
Vorteile von Motorsteuerungsmodulen gegenüber H-Brücken
Motorsteuerungsmodule bieten zahlreiche Vorteile im Vergleich zu traditionellen H-Brücken. Sie sind oft einfacher zu bedienen, da sie weniger Verdrahtung erfordern und viele bereits integrierte Schutzmechanismen haben. Diese Module sind in der Regel kompakt und ermöglichen eine schnelle Implementierung in Projekte. Zudem bieten sie oft eine bessere Integration mit verschiedenen Arduino-Boards und sind in der Lage, mehrere Motoren gleichzeitig zu steuern. In vielen Fällen können die Kosten für Motorsteuerungsmodule auch niedriger sein, wenn man die Zeit und den Aufwand für die Schaltung berücksichtigt.
Erweiterte Anwendungen und Trends in der Motorsteuerung mit Arduino
Die Möglichkeiten zur Steuerung von DC-Motoren mit einem Arduino gehen weit über die einfachen Anwendungen hinaus, die in den vorherigen Abschnitten behandelt wurden. Eine spannende Entwicklung ist die Integration von Sensoren und Feedback-Systemen, die eine präzisere Steuerung ermöglichen. Beispielsweise kann die Kombination eines Infrarotsensors oder Ultraschallsensors mit einem Motorsteuerungssystem dazu verwendet werden, Hindernisse in Echtzeit zu erkennen und den Motor entsprechend anzupassen. Dies ist besonders nützlich in Robotikanwendungen, wo autonome Navigation erforderlich ist.
Darüber hinaus wird die Verwendung von künstlicher Intelligenz (KI) und Machine Learning in der Motorsteuerung immer populärer. Durch das Sammeln von Daten über die Motorleistung und das Verhalten können Algorithmen entwickelt werden, die lernen, wie man die Effizienz und Leistung des Motors optimiert. Diese Technologien könnten in der Zukunft die Art und Weise revolutionieren, wie Motoren in verschiedenen Anwendungen gesteuert werden, von der Automatisierung in der Industrie bis hin zu Smart-Home-Lösungen. Die Integration solcher fortschrittlichen Techniken eröffnet faszinierende Perspektiven für die Entwicklung intelligenter Systeme, die sich an die Bedürfnisse der Benutzer anpassen können.