Schrittmotoren sind eine ausgezeichnete Wahl für Arduino-Projekte, die eine präzise Positionskontrolle erfordern, wie beispielsweise in der Robotik, bei 3D-Druckern und CNC-Maschinen. Im Gegensatz zu Gleichstrommotoren, die kontinuierlich drehen, bewegen sich Schrittmotoren in definierten Schritten. Dies ermöglicht eine genaue Steuerung ohne den Einsatz von Feedback-Sensoren. In diesem Artikel erfahren Sie, wie Sie Schrittmotoren optimal in Ihren Arduino-Projekten einsetzen können.
Die gängigsten Schrittmotoren, die mit Arduino verwendet werden, sind der 28BYJ-48 und der NEMA17. Diese Motoren benötigen spezielle Treiber, um korrekt zu funktionieren, da die Pins des Arduino nicht genügend Strom oder Spannung liefern können. Zudem bietet die Arduino-Software eine integrierte Bibliothek, die die Programmierung dieser Motoren erleichtert. Mit den richtigen Verbindungen und Einstellungen können Sie eine Vielzahl von Anwendungen realisieren.
Kernpunkte:
- Schrittmotoren bieten präzise Kontrolle und sind ideal für viele Anwendungen.
- Der 28BYJ-48 und der NEMA17 sind zwei der häufigsten Modelle, die mit Arduino verwendet werden.
- Externe Treiber wie ULN2003, A4988 und DRV8825 sind notwendig, um die Motoren anzusteuern.
- Die Arduino Stepper-Bibliothek vereinfacht die Programmierung und Steuerung von Schrittmotoren.
- Eine sorgfältige Verdrahtung ist entscheidend für die sichere und zuverlässige Funktion der Motoren.
Auswahl des richtigen Schrittmotors für Ihr Arduino-Projekt
Die Auswahl des richtigen Schrittmotors für Arduino Projekte ist entscheidend für den Erfolg Ihrer Anwendungen. Faktoren wie Drehmoment, Geschwindigkeit und Präzision spielen eine wesentliche Rolle bei der Entscheidung, welcher Motor am besten geeignet ist. Schrittmotoren bewegen sich in präzisen Schritten, was sie ideal für Anwendungen macht, die eine exakte Positionskontrolle erfordern, wie etwa in der Robotik oder bei 3D-Druckern. Es gibt verschiedene Typen von Schrittmotoren, die sich in ihrer Funktionsweise und ihren Eigenschaften unterscheiden.
Zu den gängigsten Typen gehören unipolare und bipolare Schrittmotoren. Unipolare Motoren haben in der Regel einfachere Schaltungen und sind leichter zu steuern, während bipolare Motoren mehr Drehmoment bieten und in vielen Anwendungen bevorzugt werden. Bei der Auswahl sollten auch die spezifischen Anforderungen Ihres Projekts berücksichtigt werden, wie etwa die benötigte Drehzahl und das erforderliche Drehmoment. Eine fundierte Entscheidung über den Motortyp kann den Unterschied zwischen einem erfolgreichen und einem fehleranfälligen Projekt ausmachen.
Vergleich der gängigen Schrittmotoren für Arduino-Anwendungen
Es gibt mehrere Schrittmotoren, die häufig in Verbindung mit Arduino verwendet werden. Der 28BYJ-48 ist ein beliebter 5-Draht-Unipolarmotor, der sich durch eine hohe Präzision auszeichnet, aber relativ langsam mit etwa 15 U/min ist. Er benötigt 2048 Schritte für eine vollständige Umdrehung und eignet sich gut für Anwendungen, bei denen Geschwindigkeit weniger wichtig ist. Ein weiterer verbreiteter Motor ist der NEMA17, ein bipolarer Schrittmotor, der 200 Schritte pro Umdrehung bietet. Dieser Motor wird oft in 3D-Druckern und CNC-Maschinen eingesetzt, da er ein gutes Verhältnis von Drehmoment zu Geschwindigkeit bietet.
Vor- und Nachteile von unipolaren und bipolaren Schrittmotoren
Unipolare Schrittmotoren sind einfach zu steuern und bieten eine unkomplizierte Verdrahtung. Sie haben jedoch oft ein geringeres Drehmoment im Vergleich zu bipolaren Motoren. Bipolare Schrittmotoren hingegen benötigen eine komplexere Steuerung, bieten aber in der Regel ein höheres Drehmoment und eine bessere Leistung. Die Wahl zwischen diesen beiden Typen hängt von den spezifischen Anforderungen Ihres Projekts ab, einschließlich der benötigten Drehkraft und der Komplexität der Steuerung.
| Motor Modell | Typ | Schritte pro Umdrehung | Drehmoment (Ncm) | Besondere Anwendungen |
| 28BYJ-48 | Unipolar | 2048 | 3.0 | Roboterarm, einfache 3D-Drucker |
| NEMA17 | Bipolar | 200 | 45.0 | 3D-Drucker, CNC-Maschinen |
Effektive Verdrahtung von Schrittmotoren mit Arduino
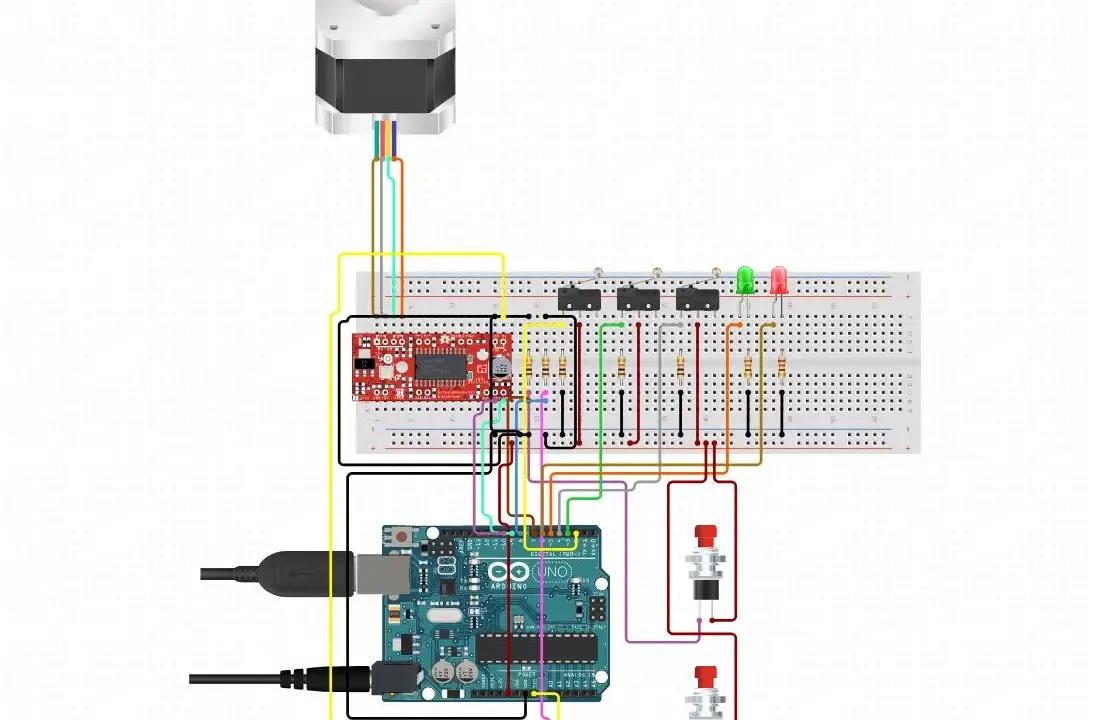
Die Verdrahtung von Schrittmotoren für Arduino ist ein entscheidender Schritt, um eine reibungslose Funktion Ihrer Projekte zu gewährleisten. Der Prozess umfasst das Anschließen des Motors an den Arduino und die Verwendung der richtigen Komponenten, um eine stabile Verbindung herzustellen. Achten Sie darauf, die richtigen Pins und eine geeignete Stromversorgung zu verwenden, um Überlastungen und Fehlfunktionen zu vermeiden. Eine fehlerhafte Verdrahtung kann zu ungenauen Bewegungen oder sogar zu Schäden an den Komponenten führen.
Um eine effektive Verdrahtung zu gewährleisten, sollten Sie auch häufige Fehler vermeiden. Dazu gehört das Verwechseln von Motoranschlüssen oder das Nichtbeachten der benötigten Spannung. Es ist wichtig, die Spezifikationen Ihres Motors und Treibers genau zu prüfen, um sicherzustellen, dass alles korrekt angeschlossen ist. Eine sorgfältige Planung der Verdrahtung kann viele Probleme im späteren Verlauf verhindern und sorgt für eine zuverlässige Leistung Ihrer Arduino Schrittmotor Ansteuerung.
Schritt-für-Schritt-Anleitung zur Verdrahtung von Motoren
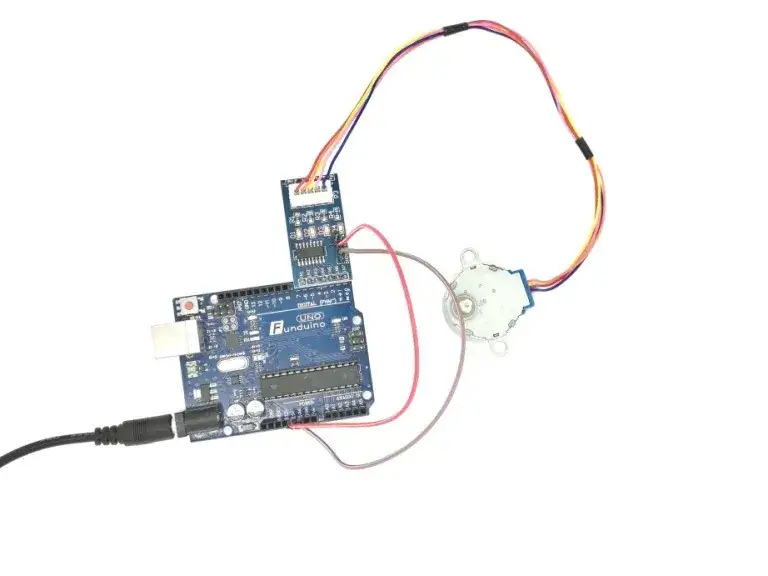
Um einen Schrittmotor, wie den 28BYJ-48, an ein Arduino-Board anzuschließen, folgen Sie diesen Schritten: Zuerst identifizieren Sie die Anschlüsse des Motors und des Treibers, in diesem Fall den ULN2003. Verbinden Sie die Motoranschlüsse mit den entsprechenden Pins des Treibers. Danach schließen Sie die Steuerpins des Treibers an die digitalen Pins des Arduino an (z. B. Pins 8 bis 11). Vergessen Sie nicht, die Stromversorgung des Treibers an eine externe Quelle anzuschließen, um eine Überlastung des Arduino zu vermeiden. Eine klare Verdrahtungsanleitung oder ein Diagramm kann Ihnen helfen, die Verbindungen korrekt herzustellen.
| Motoranschluss | ULN2003 Pin |
| 1A | Pin 1 |
| 1B | Pin 2 |
| 2A | Pin 3 |
| 2B | Pin 4 |
Wichtige Tipps zur Vermeidung von Verdrahtungsfehlern
Bei der Verdrahtung von Schrittmotoren für Arduino Projekte ist es wichtig, häufige Fehler zu vermeiden. Ein häufiger Fehler ist das falsche Anschließen der Drähte, was zu Fehlfunktionen führen kann. Verwenden Sie farbcodierte Drähte, um die Identifikation der Verbindungen zu erleichtern. Achten Sie darauf, die Stromversorgung richtig anzuschließen, um Schäden an Ihren Komponenten zu verhindern. Eine ordentliche und gut organisierte Verdrahtung trägt nicht nur zur besseren Funktion bei, sondern erleichtert auch zukünftige Anpassungen und Reparaturen.
Auswahl des passenden Treibermoduls für Ihren Schrittmotor
Die Auswahl des richtigen Treibermoduls für Ihren Schrittmotor für Arduino ist entscheidend, um die Leistung und Effizienz Ihrer Projekte zu maximieren. Bei der Auswahl sollten Sie Faktoren wie Stromstärke, Spannungsanforderungen und Funktionen des Treibers berücksichtigen. Verschiedene Treiber bieten unterschiedliche Features, wie z. B. Mikroschrittbetrieb, der eine feinere Steuerung der Motorbewegungen ermöglicht. Ein Treiber mit einer höheren Stromstärke kann auch leistungsstärkere Motoren unterstützen, was bei Anwendungen mit hohem Drehmoment wichtig ist.
Beliebte Treibermodule wie der A4988 und der DRV8825 sind weit verbreitet und bieten eine Vielzahl von Funktionen, die sie für verschiedene Anwendungen geeignet machen. Der A4988 ist bekannt für seine einfache Handhabung und kostengünstige Lösung, während der DRV8825 zusätzliche Funktionen wie eine höhere Stromstärke und verbesserte Mikroschrittsteuerung bietet. Die Wahl des richtigen Treibers kann den Unterschied zwischen einem reibungslos funktionierenden Projekt und unerwarteten Problemen ausmachen.
Vergleich der besten Treiber für gängige Schrittmotoren
Es gibt mehrere Treibermodelle, die häufig für Schrittmotoren für Arduino Projekte verwendet werden. Der A4988 ist ein beliebter Treiber, der eine maximale Stromstärke von 2 A pro Phase bietet und mit einer Vielzahl von Schrittmotoren kompatibel ist. Er unterstützt Mikroschrittbetrieb bis zu 1/16 Schritt, was eine präzisere Steuerung ermöglicht. Der DRV8825 hingegen bietet eine maximale Stromstärke von 2,5 A und unterstützt Mikroschrittbetrieb bis zu 1/32 Schritt, was ihn ideal für Anwendungen macht, die eine höhere Genauigkeit erfordern. Diese Treiber sind einfach zu verwenden und bieten eine solide Grundlage für Projekte, die Schrittmotoren ansteuern.
| Treibermodell | Max. Stromstärke (A) | Mikroschrittbetrieb | Typische Anwendungen |
| A4988 | 2.0 | Bis zu 1/16 | 3D-Drucker, Roboter |
| DRV8825 | 2.5 | Bis zu 1/32 | CNC-Maschinen, präzise Steuerung |
Funktionen und Vorteile von Treibern wie A4988 und DRV8825
Der A4988 bietet eine einfache Möglichkeit, Schrittmotoren zu steuern, und ist ideal für Anfänger. Er verfügt über integrierte Schutzmechanismen gegen Überstrom und Übertemperatur, was die Zuverlässigkeit erhöht. Der DRV8825 hingegen bietet erweiterte Funktionen wie eine höhere Stromstärke und die Möglichkeit, den Mikroschrittbetrieb zu optimieren, um die Leistung zu verbessern. Beide Treiber sind mit einer Vielzahl von Schrittmotoren für Arduino kompatibel und ermöglichen eine flexible Anpassung an die spezifischen Anforderungen Ihres Projekts.
Programmierung von Schrittmotoren mit Arduino leicht gemacht
Die Programmierung von Schrittmotoren für Arduino ist ein einfacher Prozess, der es Ihnen ermöglicht, präzise Bewegungen zu steuern. Arduino bietet eine integrierte Stepper-Bibliothek, die die Programmierung erheblich vereinfacht. Diese Bibliothek ermöglicht es Ihnen, die Anzahl der Schritte pro Umdrehung zu definieren, die Geschwindigkeit in U/min festzulegen und Bewegungen mit einfachen Befehlen wie `step()` auszuführen. Mit nur wenigen Zeilen Code können Sie komplexe Bewegungsabläufe realisieren, die für verschiedene Anwendungen geeignet sind, wie z. B. in der Robotik oder bei 3D-Druckern.
Ein Beispiel für die Verwendung der Stepper-Bibliothek könnte die Steuerung eines 28BYJ-48 Schrittmotors sein. Der Code ermöglicht es Ihnen, den Motor vorwärts oder rückwärts zu bewegen, indem Sie die Anzahl der Schritte angeben. Diese Flexibilität macht die Verwendung von Schrittmotoren mit Arduino zu einer idealen Lösung für Projekte, die eine präzise Steuerung erfordern. Im Folgenden finden Sie ein einfaches Beispiel für den Code, der die Grundlagen der Motorsteuerung demonstriert.
Beispielcode zur Steuerung von Schrittmotoren
Hier ist ein einfacher Beispielcode zur Steuerung eines Schrittmotors mit der Arduino Stepper-Bibliothek:
#include// Anzahl der Schritte pro Umdrehung const int stepsPerRevolution = 2048; // Initialisieren des Stepper-Objekts Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() { // Setzen der Geschwindigkeit auf 15 U/min myStepper.setSpeed(15); } void loop() { // Motor vorwärts bewegen myStepper.step(stepsPerRevolution); delay(1000); // Motor rückwärts bewegen myStepper.step(-stepsPerRevolution); delay(1000); }
Anpassen von Geschwindigkeits- und Bewegungsparametern
Um die Leistung Ihres Schrittmotors zu optimieren, können Sie die Geschwindigkeits- und Bewegungsparameter im Code anpassen. Die Methode `setSpeed()` erlaubt es Ihnen, die Geschwindigkeit in U/min zu definieren, wodurch Sie die Reaktionsgeschwindigkeit des Motors beeinflussen können. Darüber hinaus können Sie die Anzahl der Schritte im `step()`-Befehl variieren, um unterschiedliche Bewegungsabläufe zu erreichen. Durch das Experimentieren mit diesen Werten können Sie die optimalen Einstellungen für Ihre spezifischen Anwendungen finden, sei es in der Robotik oder bei 3D-Druckprojekten.
Anwendungsbeispiele für Schrittmotoren in Arduino-Projekten
Schrittmotoren sind äußerst vielseitig und finden in zahlreichen Arduino Projekten Anwendung, die präzise Bewegungssteuerung erfordern. Ein häufiges Beispiel ist die Verwendung von Schrittmotoren in Roboterarmen, wo sie dazu beitragen, die Gelenke genau zu positionieren und komplexe Bewegungen auszuführen. Ein weiteres Beispiel sind automatisierte Türen, bei denen Schrittmotoren eingesetzt werden, um die Türöffnung und -schließung präzise zu steuern. Diese Anwendungen zeigen, wie wichtig Schrittmotoren für die Entwicklung interaktiver und automatisierter Systeme sind.
Zusätzlich kommen Schrittmotoren in 3D-Druckern und CNC-Maschinen zum Einsatz, wo sie die exakte Positionierung des Druckkopfes oder der Fräse ermöglichen. Die Fähigkeit, in kleinen, kontrollierten Schritten zu arbeiten, sorgt für eine hohe Genauigkeit und Wiederholbarkeit. Schrittmotoren sind auch in Fotokopierern und Scanner zu finden, wo sie die Bewegung der Scanner-Einheit steuern. Diese Beispiele illustrieren, wie Schrittmotoren in verschiedenen Bereichen eingesetzt werden können, um die Funktionalität und Effizienz von Geräten zu verbessern.
- Roboterarm: Präzise Gelenksteuerung für komplexe Bewegungen.
- Automatisierte Türen: Steuerung von Öffnungs- und Schließmechanismen.
- 3D-Drucker: Exakte Positionierung des Druckkopfes für hochwertige Drucke.
- CNC-Maschinen: Präzise Bearbeitung von Materialien durch kontrollierte Bewegungen.
- Fotokopierer: Steuerung der Scanner-Einheit für genaue Kopien.
Schrittmotoren in Robotik und Automatisierungssystemen
In der Robotik sind Schrittmotoren ein unverzichtbares Element für die Bewegung und Steuerung von Robotern. Sie ermöglichen eine präzise Positionierung, die für Anwendungen wie Industrieroboter oder Serviceroboter erforderlich ist. Ein Beispiel ist ein Roboterarm, der mit Schrittmotoren ausgestattet ist, um genaue Bewegungen auszuführen, sei es beim Greifen von Objekten oder beim Ausführen von Montagearbeiten. Diese Motoren bieten den Vorteil, dass sie ohne Feedback-Sensoren arbeiten können, was die Komplexität der Steuerung reduziert und gleichzeitig die Effizienz erhöht.
Verwendung von Schrittmotoren in 3D-Druckern und CNC-Maschinen
Schrittmotoren spielen eine zentrale Rolle in 3D-Druckern und CNC-Maschinen, da sie die exakte Steuerung der Druck- oder Fräseinheit ermöglichen. In 3D-Druckern bewegen sie den Druckkopf präzise, um die Schichten des Modells genau aufzutragen. In CNC-Maschinen steuern sie die Bewegung des Fräswerkzeugs, was eine präzise Bearbeitung von Materialien ermöglicht. Die Fähigkeit, in kleinen Schritten zu arbeiten, sorgt für eine hohe Genauigkeit und Wiederholbarkeit, die für diese Anwendungen unerlässlich ist.
Erweiterte Anwendungen von Schrittmotoren in IoT-Projekten
Die Integration von Schrittmotoren in Internet of Things (IoT) Projekte eröffnet spannende neue Möglichkeiten für die Automatisierung und Fernsteuerung. In IoT-Anwendungen können Schrittmotoren verwendet werden, um Geräte präzise zu steuern, die über das Internet verbunden sind. Beispielsweise können Sie einen Schrittmotor in einem automatisierten Bewässerungssystem einsetzen, das über Sensoren gesteuert wird, um die optimale Wassermenge für Pflanzen zu liefern. Dies verbessert nicht nur die Effizienz, sondern trägt auch zur nachhaltigen Nutzung von Wasserressourcen bei.
Ein weiteres innovatives Anwendungsfeld ist die Verwendung von Schrittmotoren in intelligenten Möbeln, wie z. B. motorisierten Tischen oder Regalen, die sich automatisch an die Bedürfnisse des Benutzers anpassen. Diese Möbel können über eine Smartphone-App gesteuert werden, um die Höhe oder Position zu verändern, was den Komfort und die Benutzerfreundlichkeit erhöht. Die Kombination von Schrittmotoren mit IoT-Technologien wird voraussichtlich in den kommenden Jahren zunehmen und neue Dimensionen der Automatisierung und Benutzerinteraktion eröffnen.